基本組成
自适應巡航系統主要由自适應巡航控制系統傳感器、自适應巡航控制系統控制器、發動機管理控制器、電子節氣門執行器、制動執行器(例如ABS/ESP等)組成。
工作原理
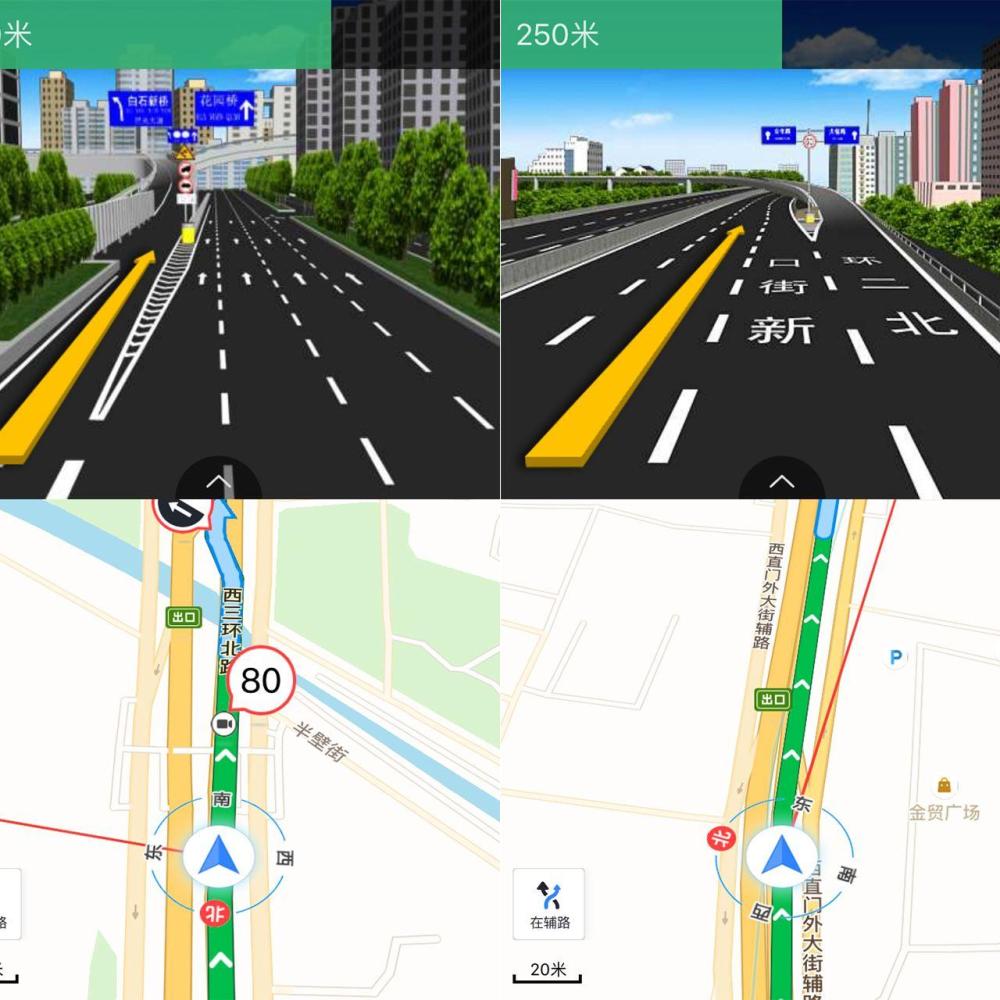
根據車間距傳感器檢測的信息,以及本車的車速傳感器和橫擺角速度傳感器檢測确定的本車行駛路線信息,來判斷在本車的同一條車道上前方有無車輛行駛。車間距離傳感器采用了微波雷達或距離雷達。
當同一條車道前方沒有車輛時,像通常的巡航控制一樣按照設定的車速行駛;當前方出現車輛時,以低于設定車速行駛,控制本車與前方車輛的合理間距。四種典型的功能:
(l)當前方無車輛時,ACC車輛将處于普通的巡航駕駛狀态,按照駕駛
員設定的車速行駛,駕駛員隻需要進行方向的控制(勻速控制)
(2)當ACC車輛前方出現目标車輛時,如果目标車輛的速度小于ACC車輛
時,ACC車輛将自動開始進行減速控制,确保兩車的距離為所設定的安全距離
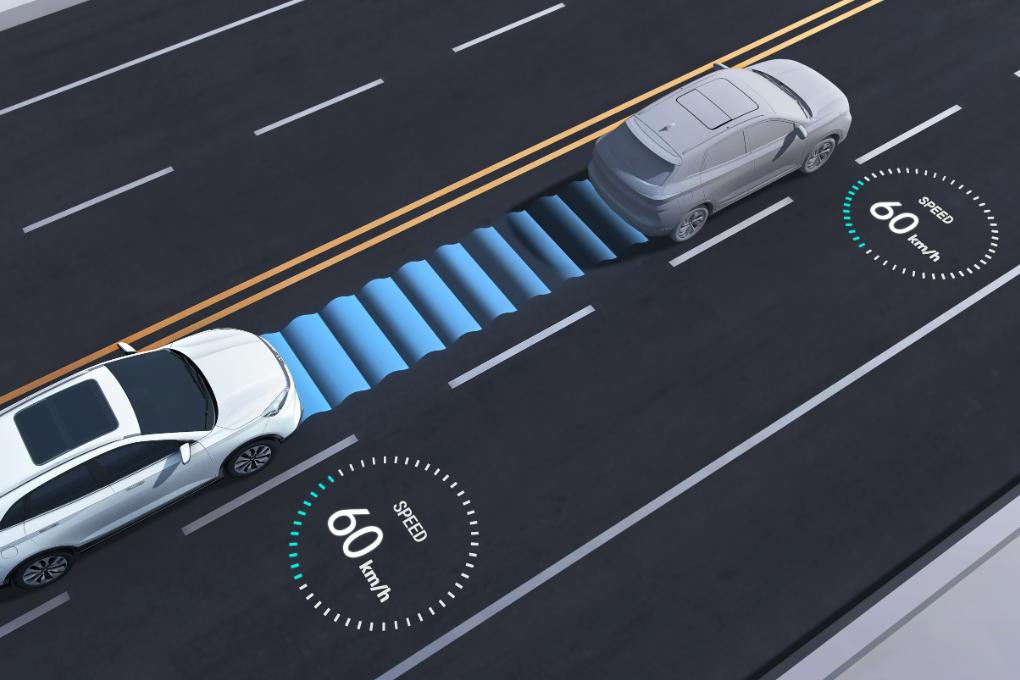
(3)當兩車之間的距離等于安全車距後,采取跟随控制,即與目标車輛以相
同的車速行駛。
(4)當前方的目标車輛發生移線,或主車移線行駛使得主車前方又無行駛車輛時,ACC系統将對主車進行加速控制,使主車恢複至設定的行駛速度。
特點
裝有自适應巡航控制系統的智能汽車,通過雷達和計算機來鑒别靠近車輛的是自行車、汽車還是行人根據道路情況控制車輛行駛狀态,完全或部分地取代了駕駛員的操作。