功用
其基本功能有:
車高調整
無論車輛的負載多少,都可以保持汽車高度一定,車身保持水平,從而使前照燈光束方向保持不變;當汽車在壞路面上行駛時,可以使車高升高,防止車橋與路面相碰,提高通過性;當汽車高速行駛時,又可以使車高降低,以便減少空氣阻力,提高操縱穩定性。
減振器阻尼力控制
通過對減振器阻尼系數的調整,防止汽車急速起步或急加速時“後蹲”;防止緊急制動時的“點頭”;防止汽車急轉彎時車身橫向搖動;防止汽車換檔時車身縱向搖動等,提高行駛平順性和操縱穩定性。
彈簧剛度控制
與減振器一樣在各種工況下,通過對彈簧彈性系數的調整,來改善汽車的乘坐舒适性與操縱穩定性。
有些車型隻具有其中的一個或兩個功能,而有些車型同時具有以上三個功能。
分類
按傳力介質的不同,電控懸架系統可分為氣壓式電控懸架和油壓式電控懸架兩種。
按控制理論不同,電控懸架系統可分為半主動式、主動式兩大類。其中半主動式又分為有級半主動式(阻尼力有級可調)和無級半主動式(阻尼力連續可調)兩種;主動式懸架根據頻帶和能量消耗的不同,分為全主動式(頻帶寬大于15Hz)和慢全主動式(頻帶寬3~6Hz);而根據驅動機構和介質的不同,可分為電磁閥驅動的油氣主動式懸架和由步進電動機驅動的空氣主動式懸架。
無級半主動懸架可以根據路面的行駛狀态和車身的響應對懸架阻尼力進行控制,并在幾毫秒内由最小變化到最大,使車身的振動響應始終被控制在某個範圍内。但在轉向、起步、制動等工況時不能對阻力實施有效的控制。它比全主動式懸架優越的地方是不需要外加動力源,消耗的能量很小,成本較低。
主動式懸架是一種能供給和控制動力源(油壓、空氣壓)的裝置。根據各種傳感器檢測到的汽車載荷、路面狀況、行駛速度、起動、制動、轉向等狀況的變化,自動調整懸架的剛度、阻尼力以及車身高度等。它能顯著提高汽車的操縱穩定性和乘坐舒适性,但是成本較高,能耗也較大。
基本原理
雖然現代汽車電控懸架系統的結構形式和控制方法多種多樣,但它們的基本原理卻是相同的。
電子控制懸架系統由傳感器與開關、控制單元、執行元件等電子器件組成。傳感器和開關将路面輸入的模拟信号轉換為數字信号傳送給控制單元ECU,控制單元ECU将傳感器輸入的電信号進行分析處理後輸出控制信号給執行元件,執行元件的機械動作改變減振器的阻尼系數,調整彈簧的高度和剛度。
結構組成
它将車身或車輪的振動量經傳感器變換成一種信息傳給控制閥,使控制閥調整彈性元件的高度和剛度,以達到調節車身高度、保證良好行駛平順性的目的。當車身發生傾斜時,布置在前、後軸上的四個控制閥控制油路系統,保持車身高度不變,使汽車具有抗側傾、抗縱傾的作用。
雖然現代汽車電控懸架系統由的結構形式多種多樣,但它們的基本組成卻是相同的。即由感應汽車運行狀況的各種傳感器、開關,電子控制單元及執行機構等組成。傳感器一般有車高傳感器、車速傳感器、加速度傳感器、轉向盤轉角傳感器、節氣門位置傳感器等。開關有模式選擇開關、制動燈開關、停車開關和車門開關等。執行機構有可調阻尼力的減振器,可調節彈簧高度和彈性大小的彈性元件等。
轉向盤轉角傳感器
轉向盤轉角傳感器用于檢測轉向盤的中間位置、轉動方向、轉動角度和轉動速度。
在電控懸架中,電子控制單元根據車速傳感器信号和轉角傳感器信号,判斷汽車轉向時側向力的大小和方向,以控制車身的側傾。現代汽車多采用光電式轉向盤轉角傳感器。
在轉向盤的轉向軸上裝有一個帶窄縫的圓盤,傳感器的光電元件(即發光二極管)和光敏接收元件(光敏晶體管)相對地裝在遮光盤兩側形成遮光器。由于圓盤上的窄縫呈等距均勻分布,當轉向盤的轉軸帶動圓盤偏轉時,窄縫圓盤将掃過遮光器中間的空穴,從而在遮光器的輸出端,即可進行ON、OFF轉換,形成脈沖信号。
當轉動轉向盤時,帶窄縫的圓盤使遮光器之間的光束産生通/斷變化,遮光器的這種反複開/關狀态産生與轉向軸轉角成一定比例的一系列數字信号,系統控制裝置可根據此信号的變化來判斷轉向盤的轉角與轉速。同時,傳感器在結構上采用兩組光耦合器,可根據檢測到的脈沖信号的相位差來判斷轉向盤的偏轉方向。這是因為兩個遮光器在安裝上使它們的ON、OFF變換的相位錯開90°,通過判斷哪個遮光器首先轉變為ON狀态,即可檢測出轉向。
在車輪打滑時,不能以轉向角和汽車車速正确判斷車身側向力的大小。為了直接測出車身橫向加速度和縱向加速度,可以利用加速度傳感器。橫向加速度傳感器主要用于檢測汽車轉向時,汽車因離心力的作用而産生的橫向加速度,并将産生的電信号輸送給電子控制單元ECU。使電子控制單元能判斷懸架系統的阻尼力改變的大小及空氣彈簧中空氣壓力的調節情況,以維持車身的最佳姿勢。
加速度傳感器常用的有差動變壓器式和鋼球位移式等結構形式,下面介紹一下鋼球位移式加速度傳感器。
根據所檢測的力(橫向力、縱向力或垂直力)不同,加速度傳感器的安裝方向也不一樣。如汽車轉彎行駛時,鋼球在汽車橫向力的作用下産生位移,随着鋼球位置的變化,造成線圈的輸出電壓發生變化。所以,懸架系統電子控制裝置根據加速度傳感器輸入的信号即可正确判斷汽車橫向力的大小,從而實現對汽車車身姿勢的控制。
阻尼可調式減振器
有級式半主動懸架将阻尼分成兩級、三級或更多級,可由駕駛員選擇或根據傳感器信号自動進行選擇所需要的阻尼級。它是由調節電動機l帶動閥心2轉動,使控制閥孔3具有關閉、小開和大開三個位置,産生三個阻尼值。
剛度可調式彈簧
氣動缸由封入低壓惰性氣體和阻尼力可調的減振器、旋轉式膜片、主氣室、副氣室和懸架執行元件組成。主氣室是可變容積的,在它的下部有一個可伸展的隔膜,壓縮空氣進入主氣室可升高懸架的高度,反之使懸架高度下降。主、副氣室設計為一體既省空間,又減輕了重量。懸架的上方與車身相連,随着車身與車輪的相對運動,主氣室的容積在不斷變化。主氣室與副氣室之間有一個通道,氣體可以相互流通。改變主、副氣室的氣體通道的大小,就可以改變空氣懸架的剛度。減振器的活塞通過中心杆(阻尼調整杆)和齒輪系與直流步進電動機相連接。步進電動機轉動可改變活塞阻尼孔的大小,從而改變減振器的阻尼系數。
懸架剛度的自動調節原理如下圖所示。主、副氣室間的氣閥體上有大小兩個通道。步進電動機帶動空氣閥控制杆轉動,使空氣閥閥芯轉過一個角度,改變氣體通道的大小,就可以改變主、副氣室氣體流量,使懸架的剛度發生變化。
懸架剛度可以在低、中、高三種狀态間變化。當閥芯的開口轉到對準低位置時,氣體通道的大口被打開。主氣室的氣體經過閥芯的中間孔、閥體側面通道與副氣室的氣體相通,兩氣室之間的空氣流量越大,相當于參與工作的氣體容積增大,懸架剛度處于低狀态。
當閥芯開口對準中間位置時,氣體通道的大口被關閉、小口被打開。兩氣室之間的流量小,懸架剛度處于中間狀态。
當閥芯開口轉到高位置時,兩氣室之間的氣體通道全部被封閉,兩氣室之間的氣體相互不能流動。壓縮空氣隻能進入主氣室,懸架在振動過程中,隻有主氣室的氣體單獨承擔緩沖工作,懸架剛度處于高狀态。
控制技術
電控懸架主要包含執行機構和控制策略兩大部分。由于執行機構完全按照控制策略的要求來輸出主動力,因此電控懸架設計的關鍵,就是選取能夠為車輛提供良好性能的控制策略。不同的控制策略,将會導緻不同的懸架特性和減振效果。
最優控制
20世紀60年代,線性最優控制理論已被應用于車輛懸架系統的研究中。線性二次型調節器控制理論(簡稱LQR)和線性二次高斯型控制理論(簡稱LQG)是主動懸架設計人員常用的方法。理論上講,LQR和LQG主動懸架大幅度地改善了車輛的性能,且具有較大的穩定裕量。但主動懸架對模型攝動時基本不具備魯棒性,在激勵頻率大于60Hz時,系統極易變得不穩定。因此線性最優控制具有以下不足之處:①采用線性最優控制理論來設計主動懸架時,需要有一個明确的目标函數;②最優控制理論很難處理好頻域内的減振問題,難以使車輛兼具良好的時域和頻域性能;③沒有考慮模型的不确定性,隻是在平均意義上對随機白噪聲擾動進行了抑制。因此當模型存在攝動時,線性最優控制基本不具有魯棒性。
預瞄控制
主動懸架的預瞄控制能夠根據車輛目前的行駛狀态和未來幹擾等因素來提前給出調節作用,使懸架系統最有效地抵消外部幹擾所引起的振動。預瞄控制的實現方法有兩類,一類是将前輪懸架的狀态信息反饋給後輪懸架,另一類是通過測量車輪前方道路來獲得實時的路況信息,并将此信息作為主動懸架設計的重要依據。預瞄控制的不足之處主要有:①預瞄控制是在假定懸架系統是線性時不變系統的情況下制定的,并沒有對車輛參數的時變性加以研究;②預瞄控制要求車輛裝備特制的預瞄傳感器,雖然在技術上是可行的,但考慮到實車的制造成本、車輛工作環境對傳感器使用壽命的影響等實際問題,要将預瞄控制應用于實際還有很多問題有待解決。
自适應控制
自适應控制是一種實時調節控制器的方法,其研究對象是具有一定不确定性的系統。這裡所謂的“不确定性”是指描述被控對象及其環境的數學模型不是完全确定的,其中包含一些未知因素和随機因素。在懸架控制系統的設計中,自适應控制系統能自動監測系統參數的變化,并實時地調節控制策略,從而使系統具有良好的性能。目前,比較完善的自适應理論有模型參考自适應控制和自校正控制。前者可對控制器的參數進行直接更新,而後者是采用參數估計的方式間接地對控制器進行更新。但是自适應控制僅适合于懸架參數在某一特定範圍内緩慢變化的情況。當系統參數的變化超出特定的範圍時,系統的控制效果将會變差。
模糊控制
由人作為控制器的控制系統是典型的智能控制系統,其中包含了人的高級智能活動。模糊控制在一定程度上模仿了人的控制,其控制特點是:①不需要準确的數學模型;②将大量的控制經驗和知識作為控制的主要依據。考慮到懸架系統本身的非線性和所處環境的複雜性等因素,懸架系統可采用模糊控制策略來獲得滿意的控制效果。然而模糊控制規則的完整性、模糊子集的定義、隸屬度函數的确定、模糊推理機制等因素都會對模糊控制器的性能産生影響,而這些因素大都依賴于專家的經驗。而在很多情況下,專家經驗并不完備,有時是相互矛盾的,甚至根本沒有專家的經驗可以利用,這大大增加了模糊控制器設計的難度。為了使模糊控制器具有良好的自适應性和魯棒性,許多專家緻力于模糊控制器自動設計的研究。
神經網絡控制
人工神經網絡是在現代生物學研究人腦組織所取得成果的基礎上,将大量簡單地處理單元廣泛連結組成的複雜網絡,可用來模拟人的直觀性思維模式。神經網絡控制系統作為一個新興的領域,已經引起了控制界的興趣,許多學者将其應用在了主動懸架控制中。學習是神經網絡研究的一個重要内容,它的适應性是通過學習實現的。然而神經網絡學習速度較慢,不适合應用在實時控制中;此外,如何獲取神經網絡的訓練樣本和改進訓練策略等問題還有待于進一步研究和解決。
在上述控制方法外,還有一些其它的方法,比如滑模控制、免疫進化控制等。無論采用何種控制方法,車輛的性能均有不同程度的改善。在研究和開發中,結合實際車輛的工況,設計簡單有效、實用的控制方法是車輛主動懸架研究工作的主要目标。
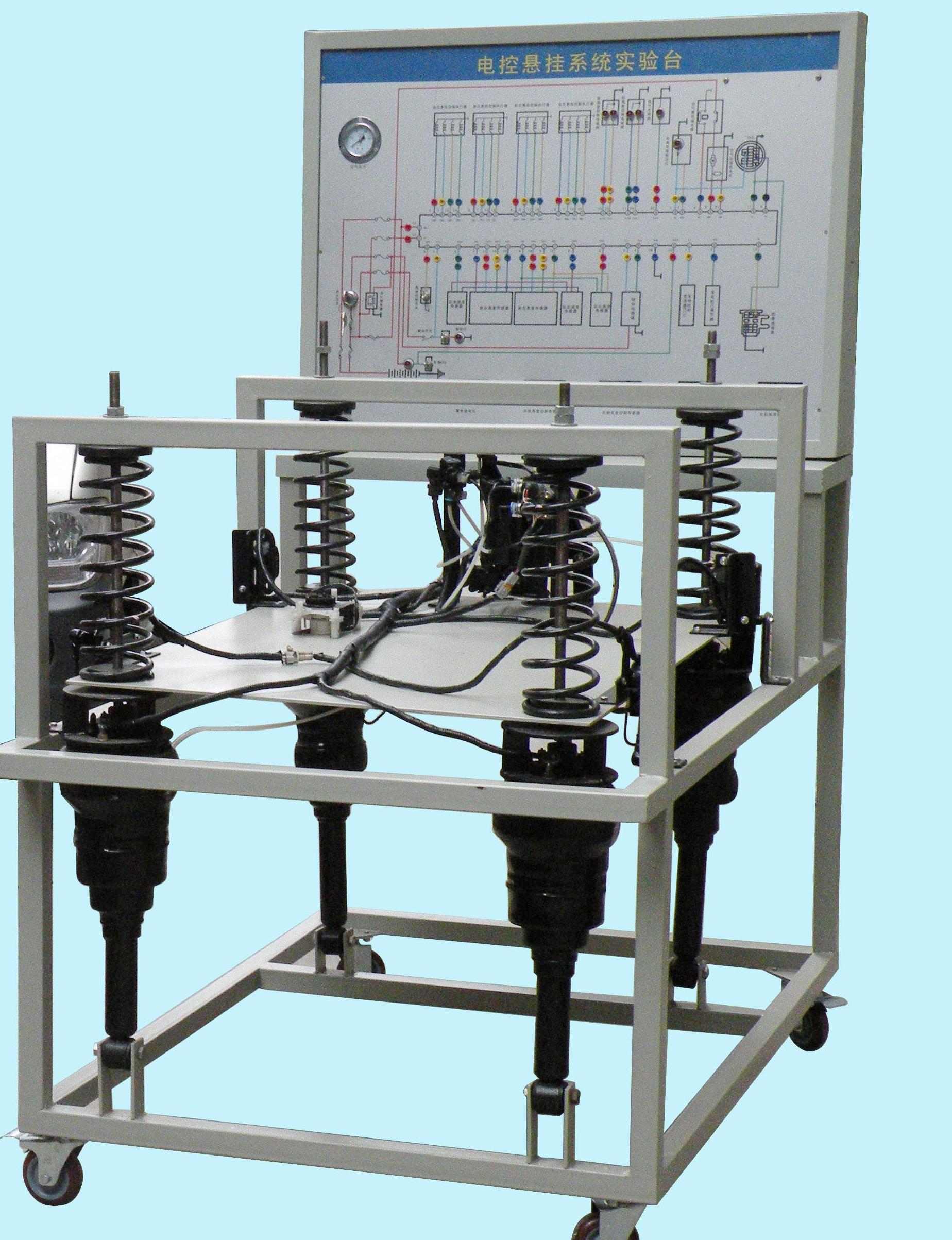
組成
1.懸架阻尼調節裝置(可調式減振器)。
2.空氣懸架剛度調節裝置(懸架控制執行器)。
3.車身高度控制裝置(空氣壓縮機、排氣閥、幹燥器、進氣閥、儲氣罐、調壓閥、電磁閥、高度傳感器、氣室及控制單元)。
工作原理
1、保持狀态。當車輛被舉升器舉起,離開地面時,空氣懸挂系統将關閉相關的電磁閥,同時電腦記憶車身高度,使車輛落地後保持原來高度。
2、正常狀态,即發動機運轉狀态。行車過程中,若車身高度變化超過一定範圍,空氣懸挂系統将每隔一段時間調整車身高度。
3、喚醒狀态。當空氣懸挂系統被遙控鑰匙、車門開關或行李廂蓋開關喚醒後,系統将通過車身水平傳感器檢查車身高度。如果車身高度低于正常高度一定程度,儲氣罐将提供壓力使車身升至正常高度。同時,空氣懸挂可以調節減震器軟硬度,包括軟态、正常及硬态3個狀态(也有标注成舒适、普通、運動三個模式等),駕駛者可以通過車内的控制鈕進行控。
基本目的
電子控制懸架系統的基本目的是:通過控制調節懸架的剛度和阻尼力,突破傳統被動懸架的局限性,使汽車的懸架特性與道路狀況和行駛狀态相适應,從而保證汽車行駛的平順性和操縱的穩定性要求都能得到滿足。
基本功能
車高調整:無論車輛的負載多少,都可以保持汽車高度一定,車身保持水平,從而使前大燈光束方向保持不變;當汽車在壞路面上行駛時,可以使車高升高,防止車橋與路面相碰;當汽車高速行駛時,又可以使車高降低,以便減少空氣阻力,提高操縱穩定性。
減振器阻尼力控制:通過對減振器阻尼系數的調整,防止汽車急速起步或急加速時車尾下蹲;防止緊急制動時的車頭下沉;防止汽車急轉彎時車身橫向搖動;防止汽車換擋時車身縱向搖動等,提高行駛平順性和操縱穩定性。
彈簧剛度控制:與減振器一樣在各種工況下,通過對彈簧性系數的調整,來改善汽車的乘坐舒适性與操縱穩定性。
發展過程
空氣懸架已經有70多年的發展曆史了。目前的應用範圍相當廣泛,特别是在商用車領域,100%的中型以上客車和80%以上的卡車都使用了空氣懸架系統。而現在在乘用車上,高檔汽車和SUV車型對其應用很廣泛。
1987年,世界上首次推出裝有空氣彈簧的主動懸架,它是一種通過改變空氣、彈簧的空氣壓力來改變彈性元件剛度的主動懸架。
1989年又推出了裝有油氣彈簧的主動懸架。
2022年5月消息,南陽淅減汽車減振器有限公司研發上線的“電控懸架系統”,可以實現汽車操控性和舒适度的完美統一,不但讓車開起來柔順、平滑,而且坐在車裡面感覺平穩、舒适。[1]
參考資料
[1] 奮進新征程 建功新時代丨高端智能減振器有了中國造 · 今日頭條[引用日期2022-05-16]