簡介
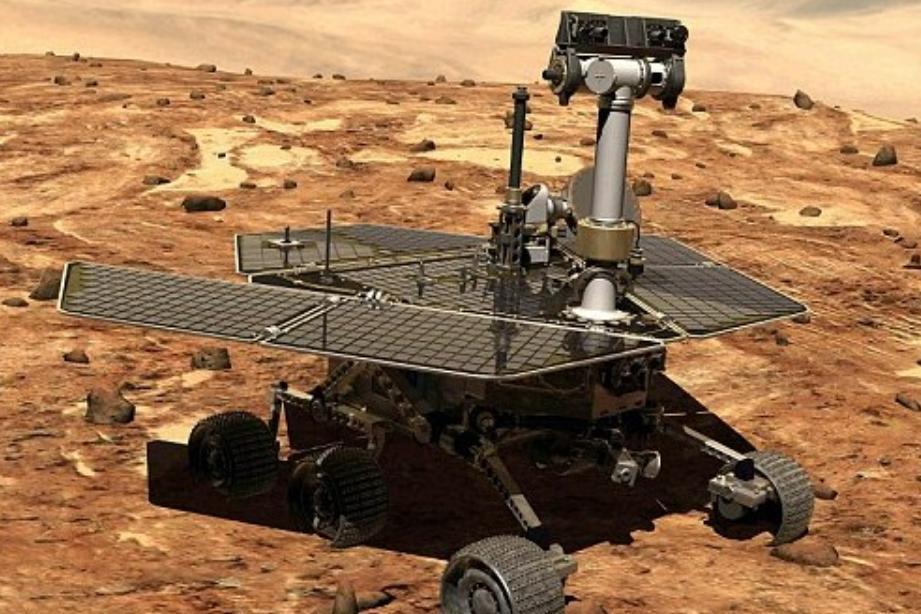
機遇号(英語:Opportunity),亦稱為機會号或火星探測漫遊者-B(MER-B),是一個于2004年進行火星探測任務的地表漫遊車;它是NASA火星探測漫遊車任務的兩輛中的其中一輛。它在2003年從地球發射,并于2004年1月25日地表UTC時間05:05(大約當地時間13:15)降落在子午線高原 ,差不多也是在姐妹号勇氣号降落在另一個地方的三周後。機遇号已經連續有效運作了超過原本設計(90個日子)30倍的任務時間;由于太陽能發電闆被清潔幹淨,它因此能夠繼續執行大量對火星岩石的地質分析和地表描繪。任務的重點包括了完成90個火星日的任務,發現了火星上的第一個隕石隔熱罩岩(在子午線高原),以及超過兩年的時間研究維多利亞撞擊坑。機遇号驚險的在2007年的沙塵暴中存活了下來,現在正朝向奮鬥撞擊坑前進。位于帕薩迪納的噴射推進實驗室(JPL),是加州理工學院的一個下屬部門,現負責管理火星探測漫遊者計劃。
目标
火星探測計劃的科學目标有以下幾點:
搜尋岩石和土壤的特征來尋找過去是否曾經有水的流動。特别的是找尋的樣本将包括受到水的沉澱、蒸發、沉積膠結和熱液活動所影響的礦物質。
測量降落地點周遭的礦物、岩石和土壤的分布區域和成分。
測量何種地質作用造成當地的岩層和如何影響化學作用。這些作用包括水、風蝕、沉澱、熱液過程、火山活動和隕石撞擊所造成的影響。
火星偵察軌道器上的儀器将會執行分類和确認地表上的這些觀察資料;機遇号将會協助判定軌道器對火星作觀察所用的儀器是否準确和有效。
搜尋含鐵的礦物質并鑒定和定量一些相對的、且含水或者在水中形成的特定種類礦物,像是含鐵碳酸鹽。
分類岩石和土壤的礦物和成分并且分析形成它們的作用。
尋找當以前液态水存在時,地質所含有當時環境狀況的可能證據。
評估火星上的環境是否有益于生命。
在接下來的二十年裡,NASA将會繼續領導任務來研究生命是否曾存在于火星上;搜尋行動在分析火星環境是否對生命适居時一同進行。生命,如我們所知必須要有水才能生存,因此火星上曾經存在過水的曆史對于尋找當時火星上使否對生命适居的可能性一直存在着争議。雖然火星探測漫遊者計劃沒有能力去直接尋找到生命存在的證據,但是它對于火星史上的自然環境是否可居提供了非常重要的資訊。
設計構造
機遇号是一個六輪、太陽能動力車,高1.5米、寬2.3米以及長1.6米、180公斤重。六個輪子上有鋸齒狀的凸出紋路(rocker-bogie)來适應地形,每個輪子都有自己的馬達,車體本車裝載于前後端來讓本身能夠在30度的傾斜範圍保持安全。最高車速是5毫米/每秒(2英寸/每秒),雖然平均速度隻有最高車速的五分之一。機遇号和他的姐妹-勇氣号都載有紐約世貿大樓的金屬殘片,這些殘片重新制成護盾來保護鑽孔機械上的電纜。
太陽能闆陣列能夠在每個火星日産生約140瓦的電力讓可充電式的锂離子電池儲存電力并在晚上使用将近4個小時。機遇号的車體上的電腦使用了一個20MHZ的RAD6000中央處理器、128MB的DRAM、3MB的EEPROM以及256MB的快閃存儲器。它的車體作業溫度介于−40 °C到40 °C,車上由電熱器在必要時能支援的放射性同位素熱電機也提供了基本的溫度控制。一個黃金薄膜和一層二氧化矽氣凝膠進行隔熱。
機遇号和地球之間的通訊以一架低增益天線以低傳輸速度進行溝通,也有一架高增益天線也進行通訊。低增益天線也用來向環繞火星的軌道器傳輸資料。
修正後的科學/工程儀器包括了:
全景相機-用以調查當地岩層的結構、顔色、礦物學和組織。
導航相機-視野較大但是分辨率低且是黑白的,用以導航和行走。
微熱放射光譜儀(Mini-TES)-近距離分辨可能的岩石和土壤并決定作用形成的原因。
危險回避相機(Hazcams)-兩台具有120度視野的B&W相機,提供車上額外的資料顯示周遭環境。
機遇号車體上的機械手臂包括了以下儀器:
穆斯堡爾(Mössbauer)光譜儀MIMOS II-用來實地觀察對于含鐵岩石與土壤之礦物學的研究。
阿爾發粒子X光光譜儀-用來實地觀察形成岩石與土壤的大量元素之分析。
磁鐵-用來搜集具磁性的沙粒。
顯微圖像器-用來獲取實地觀察的岩石與土壤的高分辨率相片。
岩石摩擦工具-用來顯露出新的物質成分來讓車上的儀器做調查。
相機會提供1024*1024pixel的相片,資料稍後會以ICER進行壓縮、儲存和傳送。
定位方法
無線電測控定位
勇氣号和機遇号火星車用其無線電系統同地球跟蹤站直接通信或與火星軌道器通信,根據無線電信号的多普勒頻移來确定火星車在火星慣性參考系統中的位置。通過多次重複測控定位,火星車在慣性參考系統中的定位精度可達1~10m。無線電測控确定的火星車位置可以轉換到星固參考系統中,轉換精度為±250m。
勇氣号火星車着陸後,美國噴氣推進實驗室(Jet Propulsion Laboratory,JPL)導航團隊把第2個火星日至第4個火星日地球測控站直接得到的雙向多普勒信号以及勇氣号與奧德賽軌道器在兩次通信窗口得到的雙向多普勒信号聯合處理,得到了着陸器的位置(即火星車初始位置)。機遇号着陸器的定位也采用了相同的方法。在勇氣号的第94至98火星日位置、機遇号第75至第78火星日位置火星車原地不動實施軟件更新上載任務,無線電測控定位方法在這兩個位置再次對火星車進行定位。着陸點和軟件更新位置也通過衛星圖像中地物識别和平面三角交會的方法定位。将無線電測控定位位置轉換至星固參考系統并與基于衛星圖像定位的位置相比較發現,兩種定位方法勇氣号兩個位置的差别均為370m左右,在機遇号的兩個位置均為135m左右,表明兩種方法都精确、可靠,兩種方法得到的位置的差别主要來源于慣性參考系統和星固參考系統轉換帶來的誤差。此後,無線電測控定位方法還用于少數幾個火星車停留了較長時間的關鍵位置。
無線電測控定位方法的優點是全局絕對定位,缺點是無法實現實時自主定位。應當結合其他方法使用,并消除慣性參考系統和星固參考系統坐标轉換帶來的誤差。适合用于着陸器定位和火星車停留較長位置的定位。
航迹推算
航迹推算法(Dead Reckoning)基于裡程表和慣性導航器件(Inertial Measurement Unit,IMU)計算火星車的位置和姿态,不依賴于外界環境信息,是一種車上實時自主定位方法。勇氣号和機遇号火星車所用IMU是Litton LN-200型,由表面姿态位置及指向(Surface Attitude Position and Pointing,SAPP)軟件以8Hz的頻率計算和更新其姿态和位置,其中姿态更新由三軸加速度計和三軸陀螺儀量測,位置由IMU和裡程計轉數共同計算。SAPP軟件獲取火星車位置的設計精度為行駛距離的10%,即在100m的行駛距離累積定位誤差不超過10m。
航迹推算法的優點是功耗小、自主性強、計算簡單、相對廉價,缺點是IMU随時間漂移及車輪打滑在長距離導航定位中會産生較大誤差,例如在勇氣号着陸區的哥倫比亞山、機遇号着陸區的鷹坑(Ea-gleCrater)和耐力坑(Endurance Crater)上坡時出現過嚴重的打滑現象,其中在哥倫比亞山上坡時有一次高達125%的車輪打滑(指令是向前行駛,實際打滑到後面)。根據其固有的優缺點,航迹推算法作為基本的車上實時定位方法仍然會被廣泛應用,當有條件應用其他精度較高的方法時再對其定位誤差進行定期或不定期的改正。
太陽圖像确定方位角
勇氣号和機遇号火星車還用其Pancam作為太陽敏感器獲取太陽圖像,确定圖像中太陽質心位置,計算相對于火星車參考系統的太陽方位角和高度角,然後利用太陽星曆表和太陽時計算太陽方位角和高度角,通過兩組姿态的關系計算火星車相對于正北方向的絕對方位角,改正IMU随時間漂移帶來的方位角累積誤差。根據在地球上的測試,用太陽圖像确定方位角的精度為±3°。這一方法無法單獨用于探測車定位,未來的月球車和火星車探測任務中應與航迹推算法結合使用,用于不定期地改進方位角測定精度。
視覺測程
視覺測程法(VisualOdometry,VO)基于連續拍攝的導航相機立體像對在二維影像平面和三維地面空間追蹤特征點并估計相對的位置和姿态實現車上實時定位,改正由航迹推算方法在車輪打滑時帶來的較大定位誤差。JPL開發的VO算法的基本過程是:
在第一個立體像對上用Förstner算子提取特征點;
用相關系數法在第一個立體像對上進行特征點匹配,并用雙二次方内插方法将匹配位置定位到子像素,計算匹配成功的特征點三維坐标;
根據航迹推算獲得的第二個立體像對的位置和姿态将這些三維點投影到第二個立體相對中,用相關系數法匹配實現特征點的追蹤并計算新的三維坐标;
用RANSAC方法在計算兩組三維點六自由度剛性變換過程中剔除匹配和追蹤的粗差,最後用最大似然估計計算第二個立體像對相對于第一對立體像對的位置和姿态變化,進而獲得火星車在前後兩個位置間的位置和姿态變化;
對新獲取的立體像對重複以上過程,更新火星車位置和姿态,若提取和追蹤的特征點數量不足或最終的位置和姿态估計不收斂,則不更新而沿用航迹推算法得到的位置和姿态。
為了保證前後立體像對間有較大的重疊和較小的目标形狀變化,相鄰像對間拍攝間距不超過75cm,攝影方位角的變化不超過18°。由于火星車上計算機速度的限制,獲取和處理一個立體像對并更新位置和姿态需要近3min的時間,速度太慢,因而VO無法用于勇氣号和機遇号的全行程,而是用于部分短距離關鍵路徑上的局部定位(一般小于15m),如預計車輪打滑時、接近指定的科學目标時。
JPL曾在地球上模拟火星環境下多次試驗驗證視覺測程法的有效性和精度。在“火星庭院”的一次典型試驗中,火星車行駛了24m,VO定位誤差小于2.5%;在“約翰遜山谷”的一次29m行駛試驗中,VO産生的定位誤差小于1.5%。據JPL研究者的報道,從着陸至2005年3月5日的一年多時間裡,勇氣号有184個火星日行駛,其中52個火星日應用了視覺測程,計算收斂成功率為97%;機遇号有172個火星日行駛,其中75個火星日應用了視覺測程,成功率為95%。VO不成功的情況一般是沒有足夠的特征點、特征點分布範圍太小、火星車自身陰影的影響等。
總之,勇氣号和機遇号火星車所用的視覺測程方法的優點是自主性強、精度較高,能改正航迹推算方法在車輪打滑和IMU漂移時的定位誤差;其缺點是計算速度慢、隻能應用于局部定位,成功與否依賴于地形特征。VO速度慢的缺點部分是由于火星車計算機的計算能力限制,未來的火星車或月球車計算機的計算能力應該會強得多。針對在地形特征貧乏情況下VO失敗的情況,應開發新的算法并結合其他定位方法予以克服。随着計算機能力的提高和算法的改進,未來的VO定位方法是可以實現快速、全程定位,可望得到廣泛應用。
光束法平差定位
美國俄亥俄州立大學制圖與地理信息系統實驗室開發的基于光束法平差(Bundle Adjustment,BA)的定位方法是将導航相機和全景相機在不同攝站拍攝的圖像連接起來構成圖像網,通過對圖像網的攝影測量光束法平差,提高圖像位置和方位參數以及地面點位置的精度和一緻性,從而實現火星車的長距離高精度定位。在加利福尼亞銀湖沙漠同JPL做的聯合野外測試表明,利用降落圖像和地面火星車圖像聯合光束法平差定位精度達0.1%,僅用火星車圖像的光束法平差定位精度為0.2%。光束法平差定位方法的優點是不需要短距離連續拍照,可以在火星車整個路徑上進行全局定位,定位精度較高,缺點是尚未達到全自動化,需要在地球上計算。
對勇氣号火星車的光束法平差定位從着陸點開始一直持續,BA改正了航迹推算法在車輪打滑和IMU漂移帶來的較大的累積誤差。例如:從第154至第670個火星日,勇氣号從山腳下爬上了Husband山的山頂并開始下坡,同BA定位結果相比,航迹推算法定位累積誤差為67.9m,占行駛距離1.85km的3.7%,其中最大相對誤差為10.5%(行駛540.6m時累積誤差56.6m)。由于火星上沒有GPS提供精确的地面實況數據,無法精确評估火星車的絕對定位精度。然而,在2005年1月3日發布的MOCNA(Mars Orbital Camera,Narrow Angle)1m分辨率的衛星影像中,可以看到從着陸點到哥倫比亞山的大部分車轍。用此衛星圖像中觀測到的行駛路線與光束法平差定位得到的行駛路線進行對比,發現在路線終點的差别為12m,約為行駛距離3.08km的0.4%。此誤差間接表達了BA定位的精度,其中也包含了衛星影像處理的誤差。
自機遇号在“鷹坑”内着陸至第62個火星日,基于光束法平差的定位處理改正了由于車輪打滑帶來的高達21%的定位誤差。此後,由于該區火星表面幾乎沒有岩石等明顯特征,行駛距離過長而沒有拍攝圖像,使得基于BA的連續定位方法無法實施。在能夠觀測到明顯特征(如隕石坑)的地方,用火星車圖像産生的正射影像同衛星影像地圖對比來對機遇号火星車定位。光束法平差定位方法應當在未來的月球車和火星車探測任務中發揮重要的作用。需要進一步增強該方法,提高自動化程度,關鍵之一是自動選取相鄰攝站間的連接點構成影像區域網。近兩年,俄亥俄州立大學與JPL聯合開發了基于BA和VO集成的長距離火星車定位技術,在保持高精度的前提下顯著提高了自動化程度,并在銀湖沙漠進行了測試。
地面影像與高分辨率衛星影像對比
盡管VO和BA方法的定位精度遠高于航迹推算法,它們在長距離的定位中仍然不可避免地有誤差累積。即使BA的定位精度為0.2%,10km的行駛路線也會産生20m的累積誤差。可以應用高分辨率的衛星圖像消除僅利用地面傳感器和圖像進行火星車定位的誤差累積。火星衛星圖像的分辨率越來越高,如HiRISE圖像分辨率為30cm,為實現這一目的提供了有利條件。可以用火星車圖像産生的正射影像同高分辨率圖像疊加對比;在多個HiRISE圖像中觀測到了火星車,可以直接定位消除累積誤差;對于勇氣号着陸區多石塊的特點,可以通過匹配分别從火星車圖像和HiRISE圖像中提取的石塊實現火星車在衛星圖像上的定位。在業務化運行過程中,這些方法基本上是以手工方式實現的。中科院遙感所的行星遙感制圖與導航定位研究組,近期在地面與衛星影像集成的探測車定位方面取得了積極的進展,實現了地面影像與高分辨率衛星影像的自動配準和和火星車定位,定位精度優于衛星圖像一個像素(HiRISE圖像30cm)。