簡介
RMS是單處理器下的最優靜态調度算法。1973年Liu和Layland首次提出了RMS調度算法在靜态調度中的最優性。它的一個特點是可通過對系統資源利用率的計算來進行任務可調度性分析,算法簡單、有效,便于實現。不僅如此,他們還把系統的利用系數(utilization factor)和系統可調度性聯系起來,推導出用RM調度所能達到的最小系統利用率公式。同時,這篇論文中透露出來的證明思想和方法也被人們所效仿。下面就讓我們來看看這篇文章中關于RM調度算法的重要結論。
任何一個結論都有一個模型假設,讓我們先列出這裡的假設:
(A1)所有的任務請求都是周期性的,必須在限定的時限内完成;
(A2)任務的作業必須在該任務的下一個作業發生之前完成,這樣避免了考慮隊列問題;在這裡,我們對任務和作業不作特别的區分,因為一個任務請求就是一個作業。
(A3)任務之間都是獨立的,每個任務的請求不依賴于其他任務請求的開始或完成;
(A4)每個任務的運行時間是不變的,這裡任務的運行時間是指處理器在無中斷情況下用于處理該任務的時間;
(A5)所有的非周期性任務都在特殊的情況下運行,比如系統初始化或系統非正常緊急處理程序。
(A6)其它一些假設,比如,單處理器,可搶占調度,任務切換的時間忽略不計等等。
RMS算法
(1)任務Ti(Pi,Ci,Di)模型:周期為Pi,計算時間為Ci,時限Di為周期終點。任務在周期起點釋放,高優先級任務可搶占低優先級任務的執行。
(2)優先級分配方法:靜态固定分配。優先級與周期成反比,周期越短優先級越高。
(3)可調度性分析:如果任務集滿足下式,則該任務集可調度。
定理
定理1
n個獨立的周期任務可以被RMPA調度,如果U<=n(2^(1/n)-1)。
一個任務的響應時間(response time)是指一個任務請求,這個任務實際完成的時間跨度。在靜态調度中,任務的臨界時刻(critical instant)這個概念被首先提出來,它被定義為一個特定的時刻,如果在這個時刻有這個任務的請求,那麼這個任務就會需要最大的響應時間,由此得出:
定理1:一個任務的臨界時間就是比這個任務優先級高的所有任務同時發出請求的時刻。
證明:由于一個任務的響應時間,是它自己的負載時間,加上被其它優先級高的任務所打斷的時間。由于自己的負載時間是固定的,我們考慮在什麼時候任一高優先級的任務會有最長的打斷時間。顯然,隻有當這一高優先級的任務與該任務同時請求處理時,才能可能産生最大的打斷時間。
定理1的價值在于它找到了一個證明、一個調度算法,能否調度任一任務集充分必要條件,那就是所有任務同時請求執行的時的情況下,每個任務仍能滿足各自的期限,那麼這個任務集就可以被這個調度算法調度。
有了這個推論,我們就可以證明RM調度的最優性了。
定理2
如果一個任務集能夠被靜态調度,那麼RMS算法就能夠調度這個任務集。從這個意義上說,RMS是最優的靜态調度算法。
這個定理的證明方法就是有名的交換法。
證明思路如下:
假設一個任務集S采用其他靜态優先級算法可以調度,那麼總有這樣兩個優先級相鄰的任務i和j,有Ti>Tj,而Pi≤Pj。把Ti和Tj的優先級Pi和Pj互換,明顯可以看出這時S仍然可以調度,因為在所有任務同時請求的情況下,交換這兩個任務不會影響其它任務的完成時間,同時這兩個任務都可以在各自期限内完成,按照這樣的方法,其他任何靜态優先級調度最終都可以轉換成RM調度。
RMS已被證明是靜态最優調度算法,開銷小,靈活性好,是實時調度的基礎性理論。即使系統瞬時過載,也完全可預測哪些任務丢失時限。缺點是處理機利用率較低,最壞的情況下,當n→∞時,不超過ln2(≈70%)。另外,RMS是充分但非必要條件。而在一般情況下,對于随機的任務集大約隻有88%。70%或者88%的處理器利用率,對于許多實時應用來說是一個嚴重的限制,動态調度算法如最早截止期、最先(earliest deadlinefirst,EDF)或者最少空閑時間最先(least laxity first,LLF)已經被證明是最優的,并且能夠實現100%的處理器利用率。
調度
具有資源同步約束的RMS調度
當實時任務間共享資源時,可能出現低優先級任務不可預測地阻塞高優先級任務執行的情況,叫優先級倒置。這時RMS算法不能保證任務集的調度,必須使用有關協議控制優先級的倒置時間。常用的協議有優先級頂級協議和堆資源協議,使用這些協議可使優先級的倒置時間最多為一個資源臨界段的執行時間,并且不會發生死鎖。
基于RMS的非周期任務的調度
實時系統中的非周期任務可采用延遲服務器算法或随機服務器算法進行調度。它們的最大特點是可在周期任務的實時調度環境下處理随機請求。兩者的基本思想是将非周期任務轉化成周期任務,再利用RMS算法進行調度。前者用一個或幾個專用的周期任務執行所有非周期任務,這種周期任務叫非周期任務服務器。根據周期大小,服務器有固定優先級,服務器的執行時間被稱為預算,它在每個服務器周期Ts的起點補充。隻要服務器有充足的預算,就可在其周期内為非周期任務服務。該算法實現簡單,但可調度性分析較難,有時會出現抖動,可能發生一個非周期任務在相鄰兩個服務器周期中連續執行2倍預算的現象,與RMS理論不符,需要适當修改RMS算法。随機服務器算法與延遲服務器算法相似,但預算不是在每個周期起點補充,而是在預算消耗Ts時間之後再補充。該算法與RMS分析算法一緻,但實現複雜。
RAS代表的其他釋義
均方根
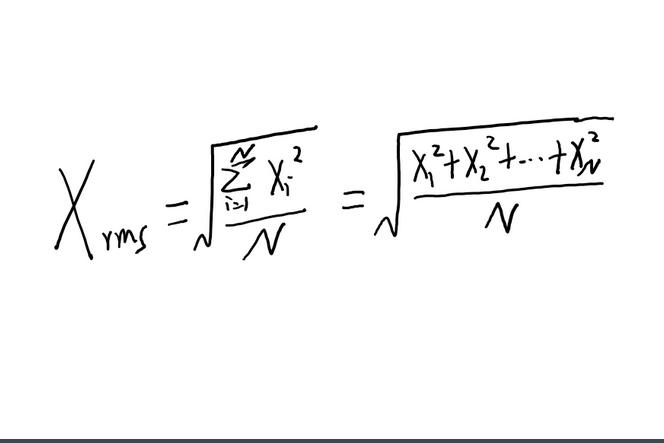
RMS(Root Mean Square)就是均方根,實際就是有效值,是一組統計數據的平方和的平均值的平方根。
RMS=sqrt[(x1^2+x2^2+......+xn^2)/n]
英語寫為:Root Mean Square(RMS).
美國傳統詞典的定義為:The square root of the average of squares of a set of numbers.
即:将N個項的平方和除以N後開平方的結果,即均方根的結果。
均方根應用:
在直流(DC)電路中,電壓或電流的定義很簡單,但在交流(AC)電路中,其定義就較為複雜,有多種定義方式。均方根(rms)指的是定義AC波的有效電壓或電流的一種最普遍的數學方法。
要得出rms值需要對表示AC波形的函數執行三個數學操作:
⑴計算波形函數(一般是正弦波)的平方值。
⑵對第一步得到的函數求時間平均值。
⑶求第二步得到的函數的平方根。
有效值
在一個阻抗由純電阻組成的電路中,AC波的rms值通常稱作有效值或DC等價值。比如,一個100V rms的AC源連接着一個電阻器,并且其電流産生50W熱量,那麼對于100V連接着這個電阻器的電源來說也将産生50W的熱量。
對正弦波來說,rms值是峰值的0.707倍,或者是峰-峰值的0.354倍。家用電壓是以rms來表示的。所謂的“117V”的交流電,其峰值(pk)約為165V,峰-峰值(pk-pk)約為330V。