分類
倒立擺系統按擺杆數量的不同,可分為一級,二級,三級倒立擺等,多級擺的擺杆之間屬于自由連接(即無電動機或其他驅動設備)。現在由中國的大連理工大學李洪興教授領導的“模糊系統與模糊信息研究中心”暨複雜系統智能控制實驗室采用變論域自适應模糊控制成功地實現了四級倒立擺。因此,中國是世界上第一個成功完成四級倒立擺實驗的國家。
控制目标
倒立擺的控制問題就是使擺杆盡快地達到一個平衡位置,并且使之沒有大的振蕩和過大的角度和速度。當擺杆到達期望的位置後,系統能克服随機擾動而保持穩定的位置。
控制方法
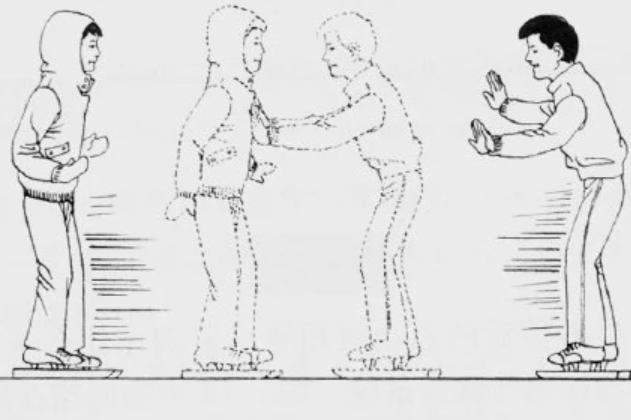
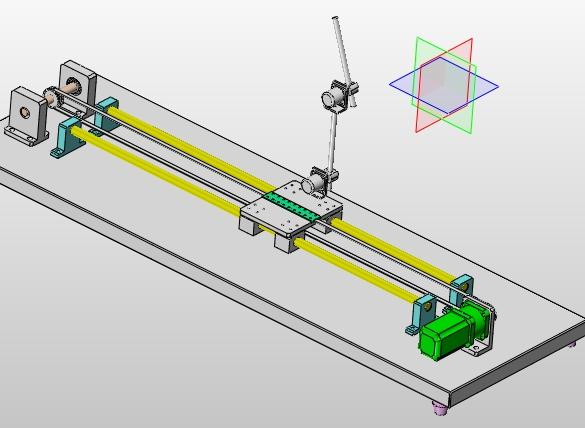
倒立擺系統的輸入為小車的位移(即位置)和擺杆的傾斜角度期望值,計算機在每一個采樣周期中采集來自傳感器的小車與擺杆的實際位置信号,與期望值進行比較後,通過控制算法得到控制量,再經數模轉換驅動直流電機實現倒立擺的實時控制。直流電機通過皮帶帶動小車在固定的軌道上運動,擺杆的一端安裝在小車上,能以此點為軸心使擺杆能在垂直的平面上自由地擺動。
作用力u平行于鐵軌的方向作用于小車,使杆繞小車上的軸在豎直平面内旋轉,小車沿着水平鐵軌運動。當沒有作用力時,擺杆處于垂直的穩定的平衡位置(豎直向下)。為了使杆子擺動或者達到豎直向上的穩定,需要給小車一個控制力,使其在軌道上被往前或朝後拉動。