简介
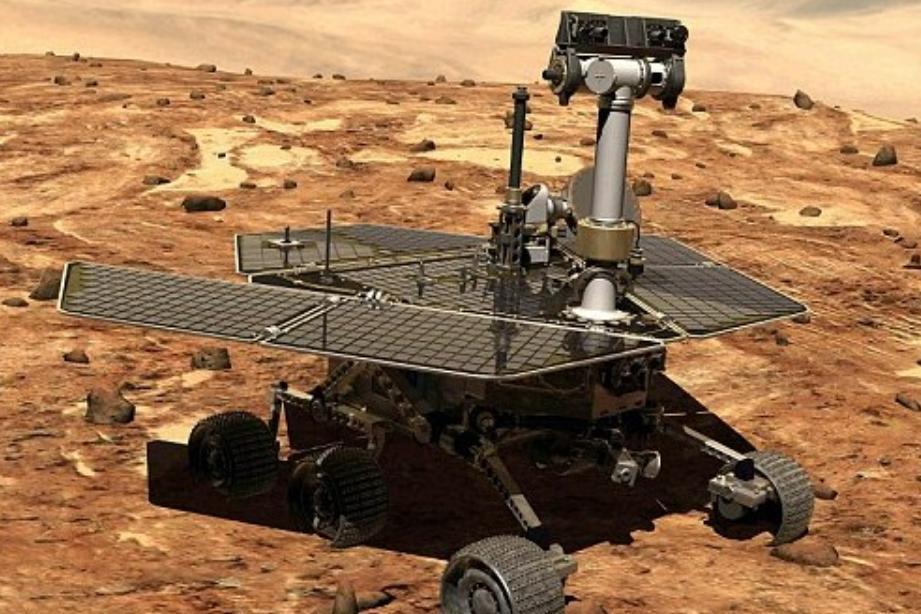
机遇号(英语:Opportunity),亦称为机会号或火星探测漫游者-B(MER-B),是一个于2004年进行火星探测任务的地表漫游车;它是NASA火星探测漫游车任务的两辆中的其中一辆。它在2003年从地球发射,并于2004年1月25日地表UTC时间05:05(大约当地时间13:15)降落在子午线高原 ,差不多也是在姐妹号勇气号降落在另一个地方的三周后。机遇号已经连续有效运作了超过原本设计(90个日子)30倍的任务时间;由于太阳能发电板被清洁干净,它因此能够继续执行大量对火星岩石的地质分析和地表描绘。任务的重点包括了完成90个火星日的任务,发现了火星上的第一个陨石隔热罩岩(在子午线高原),以及超过两年的时间研究维多利亚撞击坑。机遇号惊险的在2007年的沙尘暴中存活了下来,现在正朝向奋斗撞击坑前进。位于帕萨迪纳的喷射推进实验室(JPL),是加州理工学院的一个下属部门,现负责管理火星探测漫游者计划。
目标
火星探测计划的科学目标有以下几点:
搜寻岩石和土壤的特征来寻找过去是否曾经有水的流动。特别的是找寻的样本将包括受到水的沉淀、蒸发、沉积胶结和热液活动所影响的矿物质。
测量降落地点周遭的矿物、岩石和土壤的分布区域和成分。
测量何种地质作用造成当地的岩层和如何影响化学作用。这些作用包括水、风蚀、沉淀、热液过程、火山活动和陨石撞击所造成的影响。
火星侦察轨道器上的仪器将会执行分类和确认地表上的这些观察资料;机遇号将会协助判定轨道器对火星作观察所用的仪器是否准确和有效。
搜寻含铁的矿物质并鉴定和定量一些相对的、且含水或者在水中形成的特定种类矿物,像是含铁碳酸盐。
分类岩石和土壤的矿物和成分并且分析形成它们的作用。
寻找当以前液态水存在时,地质所含有当时环境状况的可能证据。
评估火星上的环境是否有益于生命。
在接下来的二十年里,NASA将会继续领导任务来研究生命是否曾存在于火星上;搜寻行动在分析火星环境是否对生命适居时一同进行。生命,如我们所知必须要有水才能生存,因此火星上曾经存在过水的历史对于寻找当时火星上使否对生命适居的可能性一直存在着争议。虽然火星探测漫游者计划没有能力去直接寻找到生命存在的证据,但是它对于火星史上的自然环境是否可居提供了非常重要的资讯。
设计构造
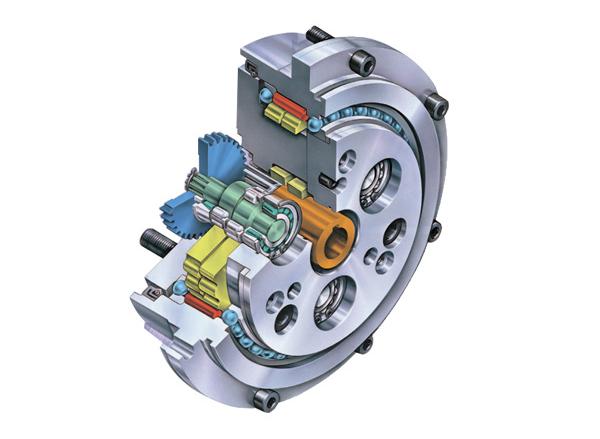
机遇号是一个六轮、太阳能动力车,高1.5米、宽2.3米以及长1.6米、180公斤重。六个轮子上有锯齿状的凸出纹路(rocker-bogie)来适应地形,每个轮子都有自己的马达,车体本车装载于前后端来让本身能够在30度的倾斜范围保持安全。最高车速是5毫米/每秒(2英寸/每秒),虽然平均速度只有最高车速的五分之一。机遇号和他的姐妹-勇气号都载有纽约世贸大楼的金属残片,这些残片重新制成护盾来保护钻孔机械上的电缆。
太阳能板阵列能够在每个火星日产生约140瓦的电力让可充电式的锂离子电池储存电力并在晚上使用将近4个小时。机遇号的车体上的电脑使用了一个20MHZ的RAD6000中央处理器、128MB的DRAM、3MB的EEPROM以及256MB的快闪存储器。它的车体作业温度介于−40 °C到40 °C,车上由电热器在必要时能支援的放射性同位素热电机也提供了基本的温度控制。一个黄金薄膜和一层二氧化硅气凝胶进行隔热。
机遇号和地球之间的通讯以一架低增益天线以低传输速度进行沟通,也有一架高增益天线也进行通讯。低增益天线也用来向环绕火星的轨道器传输资料。
修正后的科学/工程仪器包括了:
全景相机-用以调查当地岩层的结构、颜色、矿物学和组织。
导航相机-视野较大但是分辨率低且是黑白的,用以导航和行走。
微热放射光谱仪(Mini-TES)-近距离分辨可能的岩石和土壤并决定作用形成的原因。
危险回避相机(Hazcams)-两台具有120度视野的B&W相机,提供车上额外的资料显示周遭环境。
机遇号车体上的机械手臂包括了以下仪器:
穆斯堡尔(Mössbauer)光谱仪MIMOS II-用来实地观察对于含铁岩石与土壤之矿物学的研究。
阿尔发粒子X光光谱仪-用来实地观察形成岩石与土壤的大量元素之分析。
磁铁-用来搜集具磁性的沙粒。
显微图像器-用来获取实地观察的岩石与土壤的高分辨率相片。
岩石摩擦工具-用来显露出新的物质成分来让车上的仪器做调查。
相机会提供1024*1024pixel的相片,资料稍后会以ICER进行压缩、储存和传送。
定位方法
无线电测控定位
勇气号和机遇号火星车用其无线电系统同地球跟踪站直接通信或与火星轨道器通信,根据无线电信号的多普勒频移来确定火星车在火星惯性参考系统中的位置。通过多次重复测控定位,火星车在惯性参考系统中的定位精度可达1~10m。无线电测控确定的火星车位置可以转换到星固参考系统中,转换精度为±250m。
勇气号火星车着陆后,美国喷气推进实验室(Jet Propulsion Laboratory,JPL)导航团队把第2个火星日至第4个火星日地球测控站直接得到的双向多普勒信号以及勇气号与奥德赛轨道器在两次通信窗口得到的双向多普勒信号联合处理,得到了着陆器的位置(即火星车初始位置)。机遇号着陆器的定位也采用了相同的方法。在勇气号的第94至98火星日位置、机遇号第75至第78火星日位置火星车原地不动实施软件更新上载任务,无线电测控定位方法在这两个位置再次对火星车进行定位。着陆点和软件更新位置也通过卫星图像中地物识别和平面三角交会的方法定位。将无线电测控定位位置转换至星固参考系统并与基于卫星图像定位的位置相比较发现,两种定位方法勇气号两个位置的差别均为370m左右,在机遇号的两个位置均为135m左右,表明两种方法都精确、可靠,两种方法得到的位置的差别主要来源于惯性参考系统和星固参考系统转换带来的误差。此后,无线电测控定位方法还用于少数几个火星车停留了较长时间的关键位置。
无线电测控定位方法的优点是全局绝对定位,缺点是无法实现实时自主定位。应当结合其他方法使用,并消除惯性参考系统和星固参考系统坐标转换带来的误差。适合用于着陆器定位和火星车停留较长位置的定位。
航迹推算
航迹推算法(Dead Reckoning)基于里程表和惯性导航器件(Inertial Measurement Unit,IMU)计算火星车的位置和姿态,不依赖于外界环境信息,是一种车上实时自主定位方法。勇气号和机遇号火星车所用IMU是Litton LN-200型,由表面姿态位置及指向(Surface Attitude Position and Pointing,SAPP)软件以8Hz的频率计算和更新其姿态和位置,其中姿态更新由三轴加速度计和三轴陀螺仪量测,位置由IMU和里程计转数共同计算。SAPP软件获取火星车位置的设计精度为行驶距离的10%,即在100m的行驶距离累积定位误差不超过10m。
航迹推算法的优点是功耗小、自主性强、计算简单、相对廉价,缺点是IMU随时间漂移及车轮打滑在长距离导航定位中会产生较大误差,例如在勇气号着陆区的哥伦比亚山、机遇号着陆区的鹰坑(Ea-gleCrater)和耐力坑(Endurance Crater)上坡时出现过严重的打滑现象,其中在哥伦比亚山上坡时有一次高达125%的车轮打滑(指令是向前行驶,实际打滑到后面)。根据其固有的优缺点,航迹推算法作为基本的车上实时定位方法仍然会被广泛应用,当有条件应用其他精度较高的方法时再对其定位误差进行定期或不定期的改正。
太阳图像确定方位角
勇气号和机遇号火星车还用其Pancam作为太阳敏感器获取太阳图像,确定图像中太阳质心位置,计算相对于火星车参考系统的太阳方位角和高度角,然后利用太阳星历表和太阳时计算太阳方位角和高度角,通过两组姿态的关系计算火星车相对于正北方向的绝对方位角,改正IMU随时间漂移带来的方位角累积误差。根据在地球上的测试,用太阳图像确定方位角的精度为±3°。这一方法无法单独用于探测车定位,未来的月球车和火星车探测任务中应与航迹推算法结合使用,用于不定期地改进方位角测定精度。
视觉测程
视觉测程法(VisualOdometry,VO)基于连续拍摄的导航相机立体像对在二维影像平面和三维地面空间追踪特征点并估计相对的位置和姿态实现车上实时定位,改正由航迹推算方法在车轮打滑时带来的较大定位误差。JPL开发的VO算法的基本过程是:
在第一个立体像对上用Förstner算子提取特征点;
用相关系数法在第一个立体像对上进行特征点匹配,并用双二次方内插方法将匹配位置定位到子像素,计算匹配成功的特征点三维坐标;
根据航迹推算获得的第二个立体像对的位置和姿态将这些三维点投影到第二个立体相对中,用相关系数法匹配实现特征点的追踪并计算新的三维坐标;
用RANSAC方法在计算两组三维点六自由度刚性变换过程中剔除匹配和追踪的粗差,最后用最大似然估计计算第二个立体像对相对于第一对立体像对的位置和姿态变化,进而获得火星车在前后两个位置间的位置和姿态变化;
对新获取的立体像对重复以上过程,更新火星车位置和姿态,若提取和追踪的特征点数量不足或最终的位置和姿态估计不收敛,则不更新而沿用航迹推算法得到的位置和姿态。
为了保证前后立体像对间有较大的重叠和较小的目标形状变化,相邻像对间拍摄间距不超过75cm,摄影方位角的变化不超过18°。由于火星车上计算机速度的限制,获取和处理一个立体像对并更新位置和姿态需要近3min的时间,速度太慢,因而VO无法用于勇气号和机遇号的全行程,而是用于部分短距离关键路径上的局部定位(一般小于15m),如预计车轮打滑时、接近指定的科学目标时。
JPL曾在地球上模拟火星环境下多次试验验证视觉测程法的有效性和精度。在“火星庭院”的一次典型试验中,火星车行驶了24m,VO定位误差小于2.5%;在“约翰逊山谷”的一次29m行驶试验中,VO产生的定位误差小于1.5%。据JPL研究者的报道,从着陆至2005年3月5日的一年多时间里,勇气号有184个火星日行驶,其中52个火星日应用了视觉测程,计算收敛成功率为97%;机遇号有172个火星日行驶,其中75个火星日应用了视觉测程,成功率为95%。VO不成功的情况一般是没有足够的特征点、特征点分布范围太小、火星车自身阴影的影响等。
总之,勇气号和机遇号火星车所用的视觉测程方法的优点是自主性强、精度较高,能改正航迹推算方法在车轮打滑和IMU漂移时的定位误差;其缺点是计算速度慢、只能应用于局部定位,成功与否依赖于地形特征。VO速度慢的缺点部分是由于火星车计算机的计算能力限制,未来的火星车或月球车计算机的计算能力应该会强得多。针对在地形特征贫乏情况下VO失败的情况,应开发新的算法并结合其他定位方法予以克服。随着计算机能力的提高和算法的改进,未来的VO定位方法是可以实现快速、全程定位,可望得到广泛应用。
光束法平差定位
美国俄亥俄州立大学制图与地理信息系统实验室开发的基于光束法平差(Bundle Adjustment,BA)的定位方法是将导航相机和全景相机在不同摄站拍摄的图像连接起来构成图像网,通过对图像网的摄影测量光束法平差,提高图像位置和方位参数以及地面点位置的精度和一致性,从而实现火星车的长距离高精度定位。在加利福尼亚银湖沙漠同JPL做的联合野外测试表明,利用降落图像和地面火星车图像联合光束法平差定位精度达0.1%,仅用火星车图像的光束法平差定位精度为0.2%。光束法平差定位方法的优点是不需要短距离连续拍照,可以在火星车整个路径上进行全局定位,定位精度较高,缺点是尚未达到全自动化,需要在地球上计算。
对勇气号火星车的光束法平差定位从着陆点开始一直持续,BA改正了航迹推算法在车轮打滑和IMU漂移带来的较大的累积误差。例如:从第154至第670个火星日,勇气号从山脚下爬上了Husband山的山顶并开始下坡,同BA定位结果相比,航迹推算法定位累积误差为67.9m,占行驶距离1.85km的3.7%,其中最大相对误差为10.5%(行驶540.6m时累积误差56.6m)。由于火星上没有GPS提供精确的地面实况数据,无法精确评估火星车的绝对定位精度。然而,在2005年1月3日发布的MOCNA(Mars Orbital Camera,Narrow Angle)1m分辨率的卫星影像中,可以看到从着陆点到哥伦比亚山的大部分车辙。用此卫星图像中观测到的行驶路线与光束法平差定位得到的行驶路线进行对比,发现在路线终点的差别为12m,约为行驶距离3.08km的0.4%。此误差间接表达了BA定位的精度,其中也包含了卫星影像处理的误差。
自机遇号在“鹰坑”内着陆至第62个火星日,基于光束法平差的定位处理改正了由于车轮打滑带来的高达21%的定位误差。此后,由于该区火星表面几乎没有岩石等明显特征,行驶距离过长而没有拍摄图像,使得基于BA的连续定位方法无法实施。在能够观测到明显特征(如陨石坑)的地方,用火星车图像产生的正射影像同卫星影像地图对比来对机遇号火星车定位。光束法平差定位方法应当在未来的月球车和火星车探测任务中发挥重要的作用。需要进一步增强该方法,提高自动化程度,关键之一是自动选取相邻摄站间的连接点构成影像区域网。近两年,俄亥俄州立大学与JPL联合开发了基于BA和VO集成的长距离火星车定位技术,在保持高精度的前提下显著提高了自动化程度,并在银湖沙漠进行了测试。
地面影像与高分辨率卫星影像对比
尽管VO和BA方法的定位精度远高于航迹推算法,它们在长距离的定位中仍然不可避免地有误差累积。即使BA的定位精度为0.2%,10km的行驶路线也会产生20m的累积误差。可以应用高分辨率的卫星图像消除仅利用地面传感器和图像进行火星车定位的误差累积。火星卫星图像的分辨率越来越高,如HiRISE图像分辨率为30cm,为实现这一目的提供了有利条件。可以用火星车图像产生的正射影像同高分辨率图像叠加对比;在多个HiRISE图像中观测到了火星车,可以直接定位消除累积误差;对于勇气号着陆区多石块的特点,可以通过匹配分别从火星车图像和HiRISE图像中提取的石块实现火星车在卫星图像上的定位。在业务化运行过程中,这些方法基本上是以手工方式实现的。中科院遥感所的行星遥感制图与导航定位研究组,近期在地面与卫星影像集成的探测车定位方面取得了积极的进展,实现了地面影像与高分辨率卫星影像的自动配准和和火星车定位,定位精度优于卫星图像一个像素(HiRISE图像30cm)。